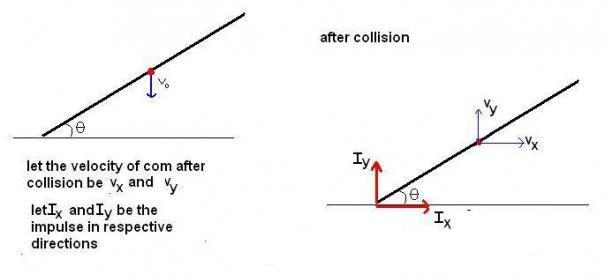
see initially i assumed both Ix and vx
abhi agar Ix zero hota hai to vx bhi apne aap automatically zero ho jaega,see equation 2
and after dt time , velocity is imparted by the impulse itself
and see, u cant just write the torque equation about that lowest point as Iα ,
i will tell u why
see angular momentum of a rigid system about any point P can be written as (angular momentum about P due to pure translational motion of centre of mass ) + (angular momentum due to pure rotational motion of COM abt P )
i.e
L_{p}=L_{cm,about P(trans)}+L_{cm,about P(rot)}
i.e
L_{p}=I_{cm}\omega +\vec{r}_{c/p}\times m\vec{v}_{c}
for this sum , pt P is the lowest pt of the rod so distance between COM and P remains same
differentiate both sides wrt time
\tau _{p}=I_{cm}\alpha +\vec{r}_{c/p}\times m\vec{a}_{c}
\tau _{p}=I_{cm}\alpha +\vec{r}_{c/p}\times m(\vec{a}_{c/p}+\vec{a}_{p})
\tau _{p}=I_{cm}\alpha +(\vec{r}_{c/p}\times m\vec{a}_{c/p}+\vec{r}_{c/p}\times m\vec{a}_{p})
now cross product of component of ac/p parallel to rc/p will be
zero, and component of ac/p perpendicular to rc/p is simply rc/pα
so \vec{r}_{c/p}\times m\vec{a}_{c/p} = mr^{2}_{c/p}\alpha
so
\tau _{p}=(I_{cm} +m{r}_{c/p}^{2})\alpha +\vec{r}_{c/p}\times m\vec{a}_{p}
\tau _{p}=I_{p}\alpha+\vec{r}_{c/p}\times m\vec{a}_{p}
here since pt P is accelerated u cant just simply write torque abt P = Ipα



 11
11